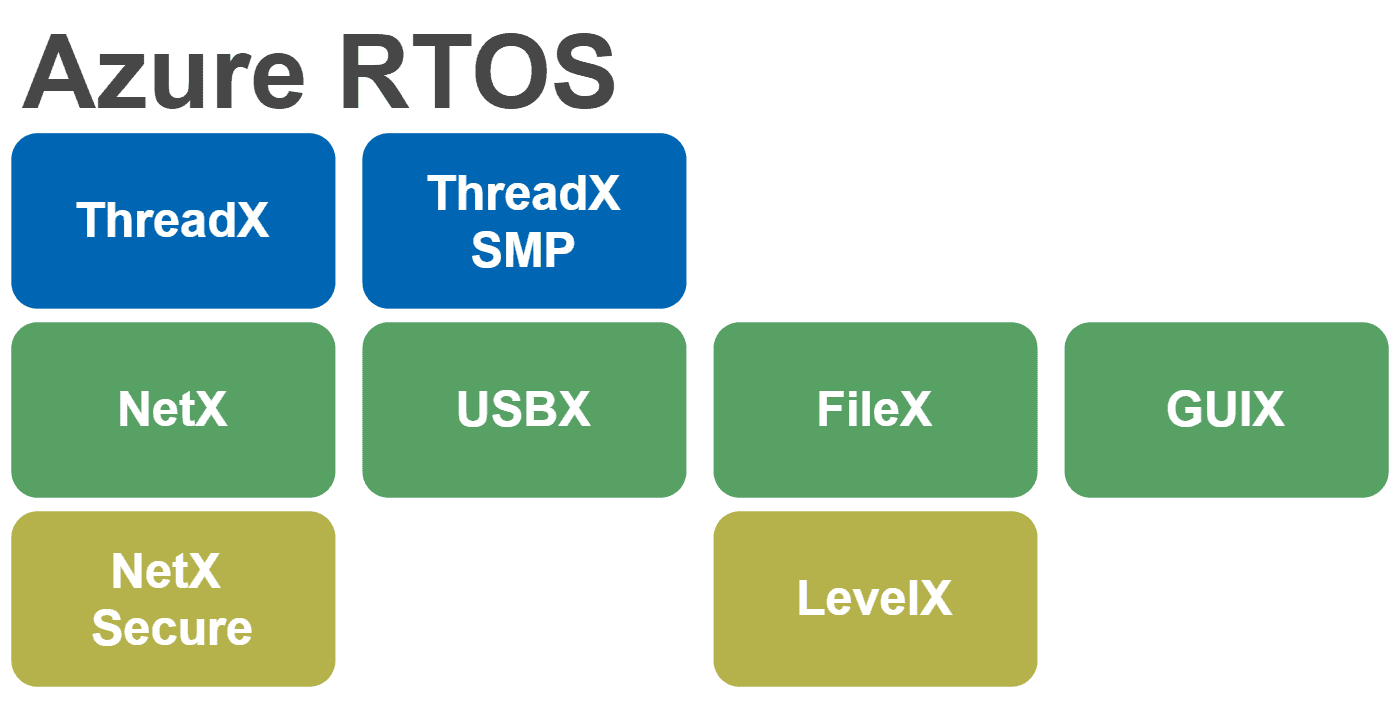
From Express Logic ThreadX to Microsoft Azure RTOS
A look at the evolution of Express Logic X-Ware and ThreadX into Microsoft Azure RTOS. Looking back at previous acquisitions of embedded software companies and what’s different with Microsoft.
Embedded Software Insight
A look at the evolution of Express Logic X-Ware and ThreadX into Microsoft Azure RTOS. Looking back at previous acquisitions of embedded software companies and what’s different with Microsoft.
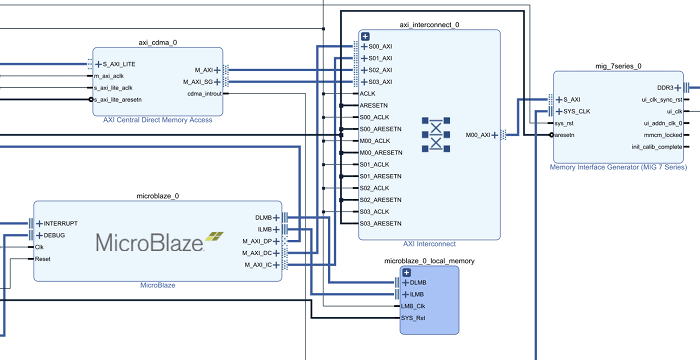
This article will look into details the cache configuration for the MicroBlaze that was skipped in part 2. Configuring the cache correctly is critical to the overall performance of a MicroBlaze system and can also take a considerable amount of FPGA resource, especially block RAM. When configuring the cache, the goal is to use the minimum cache size required to meet the application’s performance but no larger.
This article aims at helping developers and designers who must configure a MicroBlaze system. Especially early on in the development process where the final firmware is not available for benchmarking and tweaking. At these early steps it is often necessary to select a good approximation of the final configuration to have a good idea of the resource usage of the MicroBlaze.
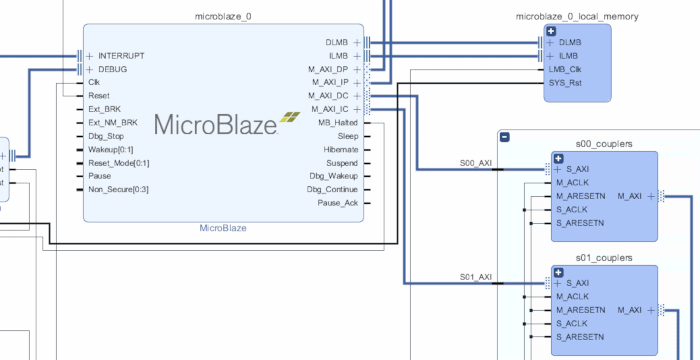
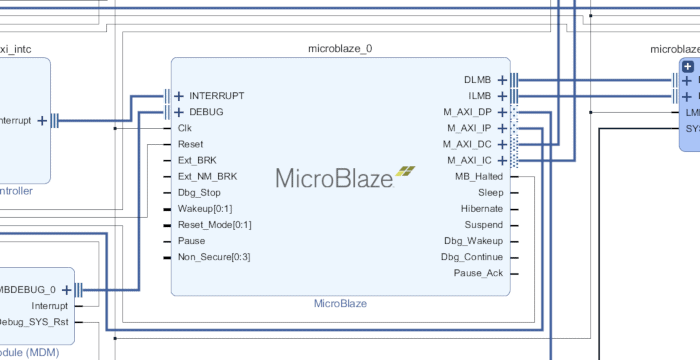
This article introduces the various memory hierarchy available when designing a MicroBlaze system using the Xilinx Vivado IP Integrator.
We announced a few weeks ago support for the Express Logic ThreadX RTOS as well as the X-WARE IoT PLATFORM™ within our very own BASEplatform™. This article goes over some of the advantages of using JBLopen’s BASEplatform Board Support Packages (BSPs) and drivers along with Express Logic’s solution. What Is the BASEplatform The BASEplatform is
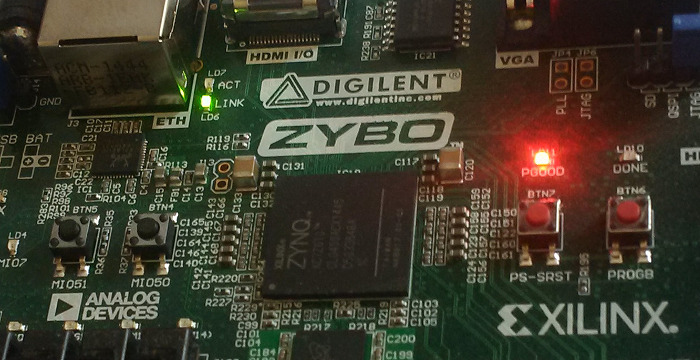
In two previous articles, I have looked at using Micrium’s uC/OS RTOS on the Xilinx Zynq-7000. I only covered kernel and storage. This time, I will be exploring some connectivity options in combination with the Digilent Zybo. Namely, using Micrium’s USB device solution and HTTP server through the Zybo’s Ethernet port. This is also a
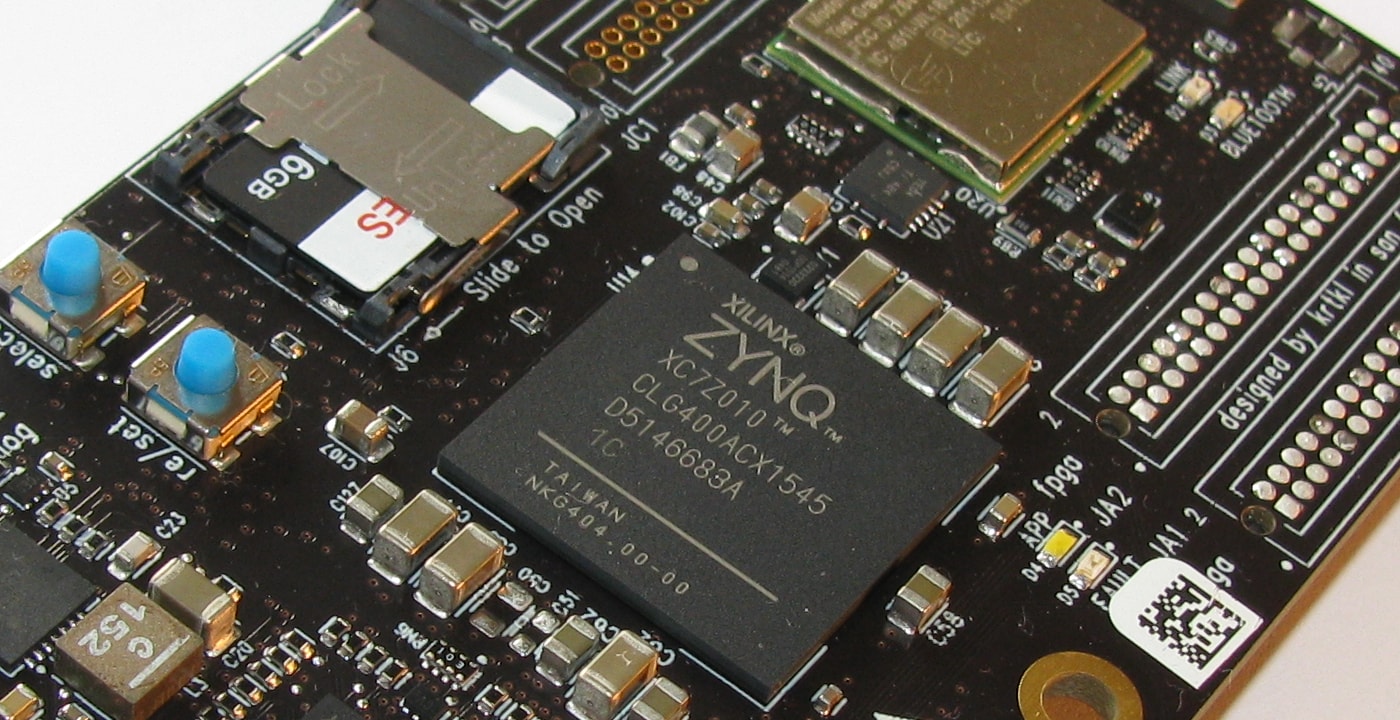
This is a continuation of the snickerdoodle adventure, following last week’s successful “hello world” , using Micrium’s µC/OS RTOS. In this series of articles, I’m exploring the capabilities of the snickerdoodle as a development platform for high performance real-time operating systems. This time, I will be running an embedded file system on the snickerdoodle module, enabling
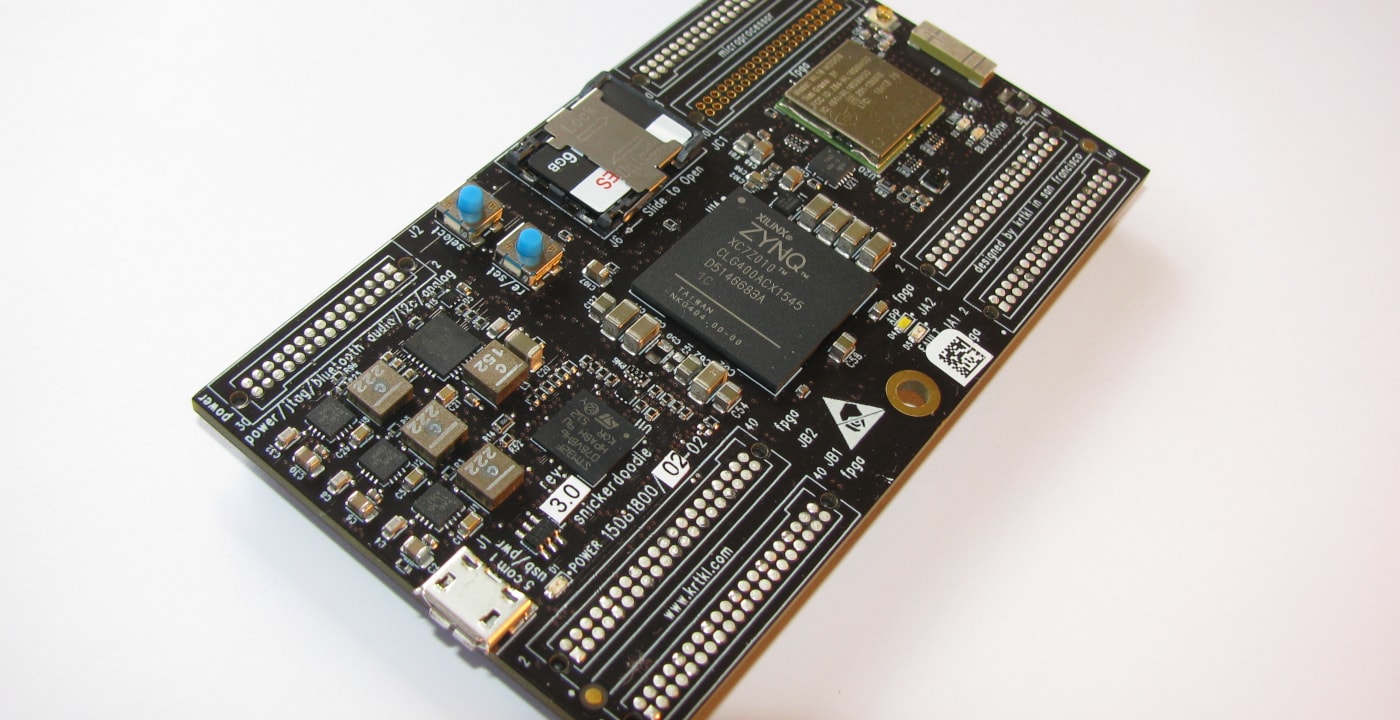
What would make a better first post about embedded software than a hello world project on a brand-new development board. It’s the krtkl snickerdoodle I received with much excitement last week. The SoM is based on the Xilinx Zynq-7000 SoC along with storage and wifi on the SoM. In these next series of articles, I’m
A look at the evolution of Express Logic X-Ware and ThreadX into Microsoft Azure RTOS. Looking back at previous acquisitions of embedded software companies and what’s different with Microsoft.
This article will look into details the cache configuration for the MicroBlaze that was skipped in part 2. Configuring the cache correctly is critical to the overall performance of a MicroBlaze system and can also take a considerable amount of FPGA resource, especially block RAM. When configuring the cache, the goal is to use the minimum cache size required to meet the application’s performance but no larger.
This article aims at helping developers and designers who must configure a MicroBlaze system. Especially early on in the development process where the final firmware is not available for benchmarking and tweaking. At these early steps it is often necessary to select a good approximation of the final configuration to have a good idea of the resource usage of the MicroBlaze.
This article introduces the various memory hierarchy available when designing a MicroBlaze system using the Xilinx Vivado IP Integrator.
We announced a few weeks ago support for the Express Logic ThreadX RTOS as well as the X-WARE IoT PLATFORM™ within our very own BASEplatform™. This article goes over some of the advantages of using JBLopen’s BASEplatform Board Support Packages (BSPs) and drivers along with Express Logic’s solution. What Is the BASEplatform The BASEplatform is
In two previous articles, I have looked at using Micrium’s uC/OS RTOS on the Xilinx Zynq-7000. I only covered kernel and storage. This time, I will be exploring some connectivity options in combination with the Digilent Zybo. Namely, using Micrium’s USB device solution and HTTP server through the Zybo’s Ethernet port. This is also a
This is a continuation of the snickerdoodle adventure, following last week’s successful “hello world” , using Micrium’s µC/OS RTOS. In this series of articles, I’m exploring the capabilities of the snickerdoodle as a development platform for high performance real-time operating systems. This time, I will be running an embedded file system on the snickerdoodle module, enabling
What would make a better first post about embedded software than a hello world project on a brand-new development board. It’s the krtkl snickerdoodle I received with much excitement last week. The SoM is based on the Xilinx Zynq-7000 SoC along with storage and wifi on the SoM. In these next series of articles, I’m